Ph.D. thesis: Gesture recognition in image sequences based on shape and motion analysis of objects with deformable shape
Author: Artur Wilkowski
Abstract
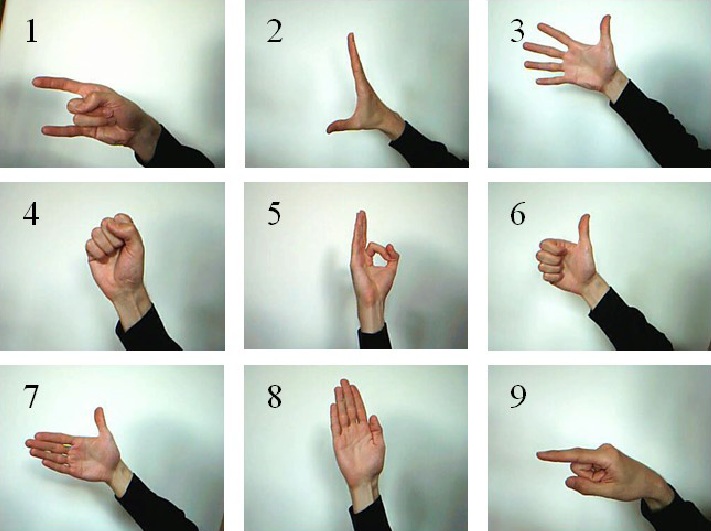
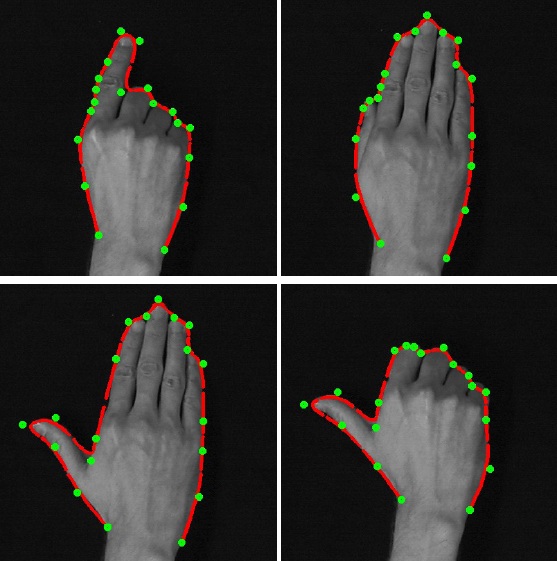
The thesis presents methods for modeling deformable objects (such as a hand)
that perform a gesture in the image and their effective detection and tracking using a-priori
knowledge about the structure of gestures performed. The ability to determine changes in
position and shape of the object in time enables also to use these methods for interpretation
of its motion, including the recognition of dynamic gestures.
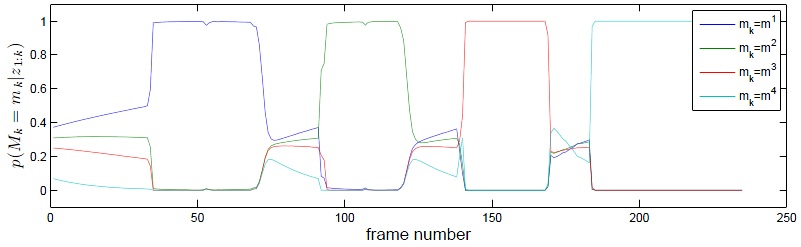
In the work the stochastic model encoding gesture structure is proposed that can be used
to perform simultaneous gesture tracking and recognition. The Dynamic Bayesian Network
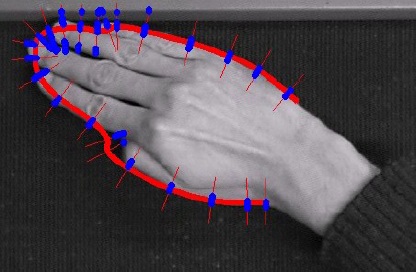
is applied for formal representation of the model. The Deformable Templates method
is utilized to encode the hand shape. Different algorithms based on Switched Kalman and
Particle Filtering are evaluated for performing network inference. It is shown that the information
provided by the inference algorithms is sufficient to perform gesture recognition
and temporal segmentation of gestures in continuous gesture sequence. In the thesis there
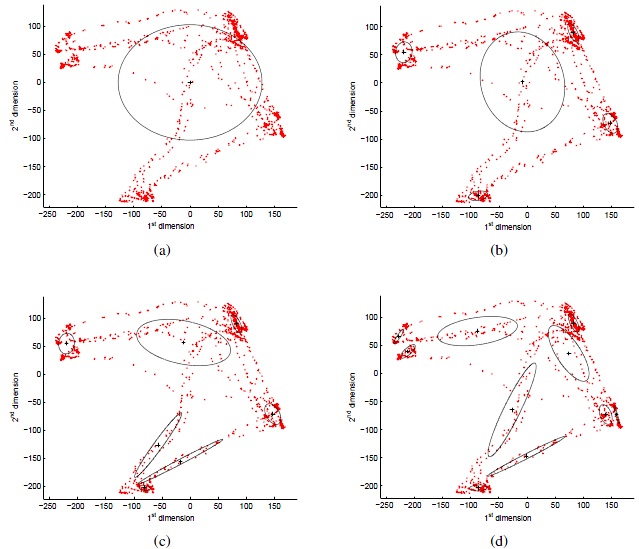
is given a method for modeling the space of hand shapes as well as learning the conditional
probability distributions of the Dynamic Bayesian Network basing on the training set of
gestures. There are also provided experimental results for gesture tracking and recognition
using the proposed system.
Title page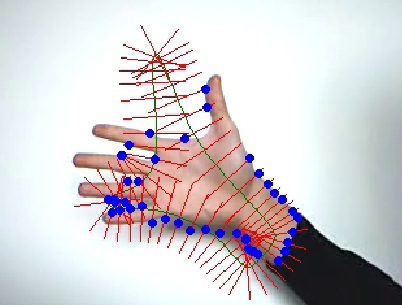



 The paper.
The paper.